This NASA Hubble Space Telescope image features the spiral galaxy NGC 1566.
ESA/Hubble & NASA, D. Calzetti and the LEGUS team, R. Chandar
This vibrant Hubble Space Telescope image features the spiral galaxy NGC 1566, sometimes informally referred to as the ‘Spanish Dancer Galaxy’. Like the subject of another recent image, NGC 1566 is a weakly-barred or intermediate spiral galaxy. This means that it does not have a clearly present or a clearly absent bar-shaped structure at its center. The galaxy owes its nickname to the vivid and dramatic swirling lines of its spiral arms, which could evoke the shapes and colors of a dancer’s moving form. NGC 1566 lies around 60 million light-years from Earth in the constellation Dorado and is a member of the Dorado galaxy group.
A galaxy group is a collection of gravitationally bound galaxies. They differ from galaxy clusters in size and mass: galaxy clusters may hold hundreds of galaxies, while galaxy groups might only hold several tens of galaxies. However, groups are the most common collection of galaxies in the universe, holding more than 50% of all galaxies. Although there is currently no precise number delineation between the definition of a galaxy group and a galaxy cluster, some astronomers have suggested that collections with less than 80 trillion Suns should be classified as galaxy groups.
The Dorado group membership has fluctuated over the past few decades, as various scientific papers changed its list of constituent galaxies. This is one example of why it is so challenging for astronomers to pin down members of galaxy groups like the Dorado group. One way to better understand this problem is by imagining a photograph of an adult human and a large oak tree. We know the approximate size of the person and the tree, so if we see a photo where the person appears roughly the same size as the tree, then we would assume that, in reality, the person was much closer to the camera than the tree. When astronomers try to figure out which galaxies are members of a galaxy group, they do not necessarily know the size of the individual galaxies. Instead, they have to work out whether the galaxies really are relatively close together in space, or whether some of them are actually much closer or much further away. This process is easier with more sophisticated observation techniques, but it still can present a challenge.
NASA Administrator Remembers Apollo Astronaut Thomas K. Mattingly II
The following is a statement from NASA Administrator Bill Nelson on the passing of former NASA astronaut Rear Adm. (ret.) Thomas K. (TK) Mattingly II.
“We lost one of our country’s heroes on Oct. 31. NASA astronaut TK Mattingly was key to the success of our Apollo Program, and his shining personality will ensure he is remembered throughout history.
“Beginning his career with the U.S. Navy, TK received his wings in 1960 and flew various aircraft across multiple assignments. Once he joined the Air Force Aerospace Research Pilot School as a student, NASA chose him to be part of the astronaut class in 1966. Before flying in space, he aided the Apollo Program working as the astronaut support crew and took leadership in the development of the Apollo spacesuit and backpack.
“His unparalleled skill as a pilot aided us when he took on the role of command module pilot for Apollo 16 and spacecraft commander for space shuttle missions STS-4 and STS 51-C. The commitment to innovation and resilience toward opposition made TK an excellent figure to embody our mission and our nation’s admiration.
“Perhaps his most dramatic role at NASA was after exposure to rubella just before the launch of Apollo 13. He stayed behind and provided key real-time decisions to successfully bring home the wounded spacecraft and the crew of Apollo 13 – NASA astronauts James Lovell, Jack Swigert, and Fred Haise.
“TK’s contributions have allowed for advancements in our learning beyond that of space. He described his experience in orbit by saying, ‘I had this very palpable fear that if I saw too much, I couldn’t remember. It was just so impressive.’ He viewed the universe’s vastness as an unending forum of possibilities. As a leader in exploratory missions, TK will be remembered for braving the unknown for the sake of our country’s future.”
For more information about Mattingly’s NASA career, and his agency biography, visit:
NASA astronaut Steve Swanson and ESA astronaut Alex Gerst set up SPHERES satellites.
Credits: NASA
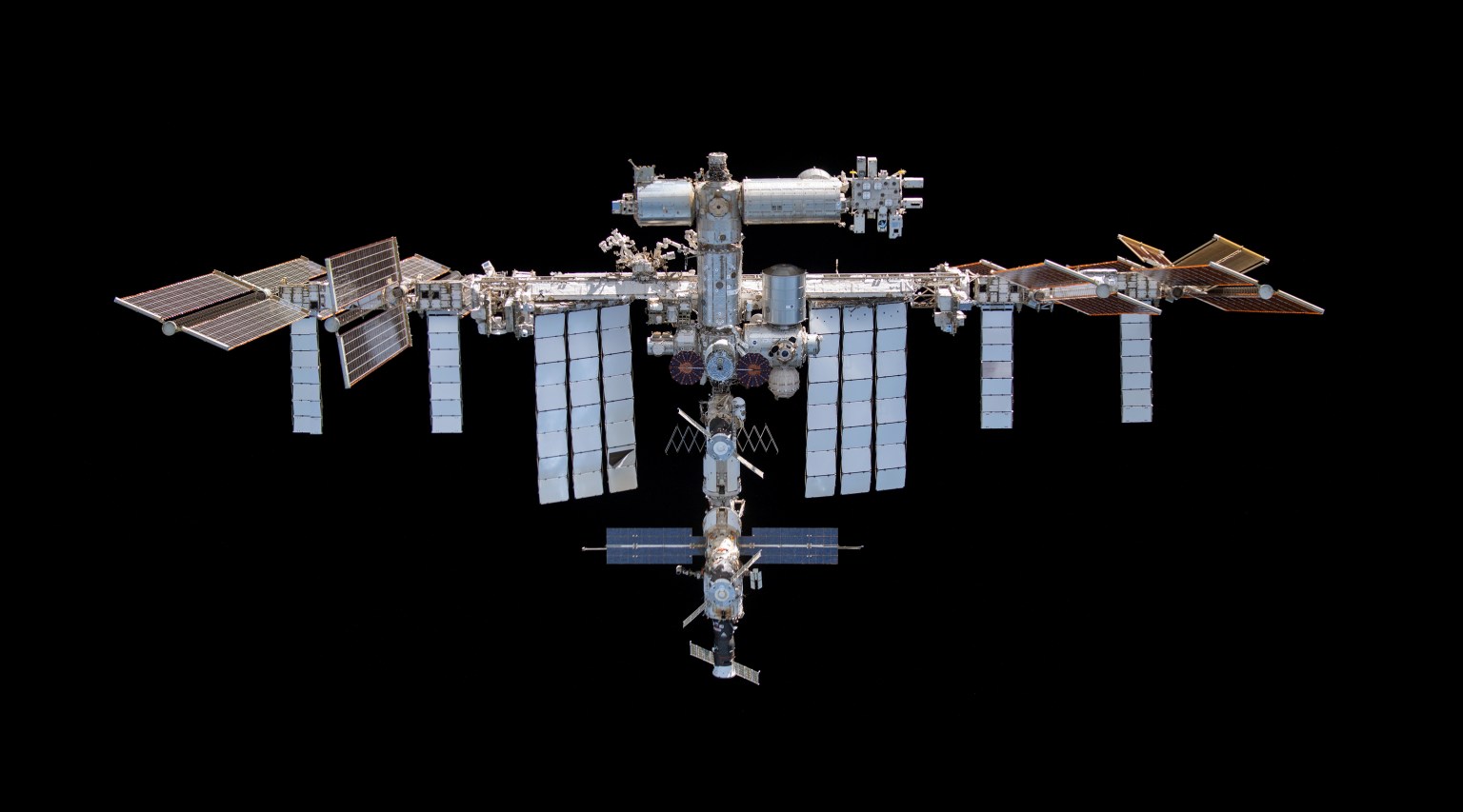
Crew time is a valuable resource on the International Space Station and its value only increases for future space missions. One way to make the most of crew time is using robotic technology either to assist crew members with various tasks and or to completely automate others.
A current investigation on the space station, JEM Internal Ball Camera 2, is part of ongoing efforts to develop this technology. The free floating remote-controlled panoramic camera launched to the space station in 2018 and this investigation from JAXA (Japan Aerospace Exploration Agency) demonstrates using the camera to autonomously capture video and photos of research activities. Currently, crew members are assigned time to take video and photos of scientific activities, which are important tools for researchers. Successful demonstration of the autonomous capture technology ultimately could free up that crew time. The investigation also serves as a test platform for other tasks robots might perform.
NASA astronaut Peggy Whitson works with the JEM Internal Ball Camera.
NASA
Three free-flying robots on the space station, known as Astrobees, support multiple demonstrations of technology for various types of robotic assistance on space exploration missions and on Earth. Results from these investigations are contributing to improvements in robotic technology and its potential.
The SoundSee Mission demonstrates using sound to monitor equipment on a spacecraft, with a sensor mounted on an Astrobee. The sensor detects anomalies in the sounds made by life support systems, exercise equipment, and other infrastructure. Sound anomalies can indicate potential malfunctions. Preliminary results from this investigation highlighted the difference between simulations and in-space experiments and noted that small changes in a simulated environment can approximate differences in expected and observed values in the target environment1. The investigation also helps characterize sound sources in the constantly changing acoustic landscape of the space station, which can inform future use of this technology.
Designing robots to traverse the surface of the Moon or Mars presents specific challenges. The landscape may be rough and uneven, requiring a robot to make time-consuming detours, and thick regolith or dust can bog down a robot and burn up a lot of fuel. One possible solution is for robots to hop over such landscapes. The Astrobatics investigation uses the Astrobees to demonstrate propulsion via a hopping or self-toss maneuver using arm-like manipulators. This approach could expand the capabilities of robotic vehicles for tasks such as assisting crews on intra- or extravehicular activities, servicing equipment, removing orbital debris, conducting on-orbit assembly, and exploring. Results show that self-toss maneuvers have a greater range of motion and provide a greater displacement from a start position2.
One of the Astrobee robots performs a self-toss or hopping maneuver for the Astrobatics investigation.
NASA
The Gecko-Inspired Adhesive Grasping investigation tested an adhesive for robotic grasping and manipulation using a special gripper on an Astrobee. Geckos are a type of lizard that can grasp a smooth surface without needing features such as nicks and knobs to hold on to. Adhesive grippers inspired by these reptiles, already proven to work in space, could allow robots to rapidly attach to and detach from surfaces, even on objects that are moving or spinning. Researchers report that the adhesives functioned as anticipated and suggested some considerations for their future use, including launching redundant adhesive tiles and ensuring complete adhesive contact in microgravity3. In addition, on robots used for intravehicular activities or spacewalks, the gecko grippers should be able to absorb kinetic energy and accommodate misalignment. The grippers also need sensors to determine when all the tiles are in contact with the surface so tension can be applied at the right moment.
ESA (European Space Agency) astronaut Samantha Cristoforetti monitors a pair of Astrobees performing autonomous maneuvers.
NASA
Space debris includes satellites that could be repaired or taken out of orbit. Many of these objects are tumbling, which makes rendezvous and docking with them a challenge. The ROAM investigation used Astrobees to demonstrate a technology to observe how a target tumbles and to use this information to plan ways to safely reach them. Simulation results validated the accuracy of the method prior to the experiment4.
A previous robotic technology, SPHERES, used bowling-ball sized spherical satellites to test formation flying and algorithms for control of multiple spacecraft as well as to host physical and material science investigations. One of those investigations tested autonomous rendezvous and docking maneuvers. The technology was able to handle increasingly complex scenarios that added static and moving obstacles5.
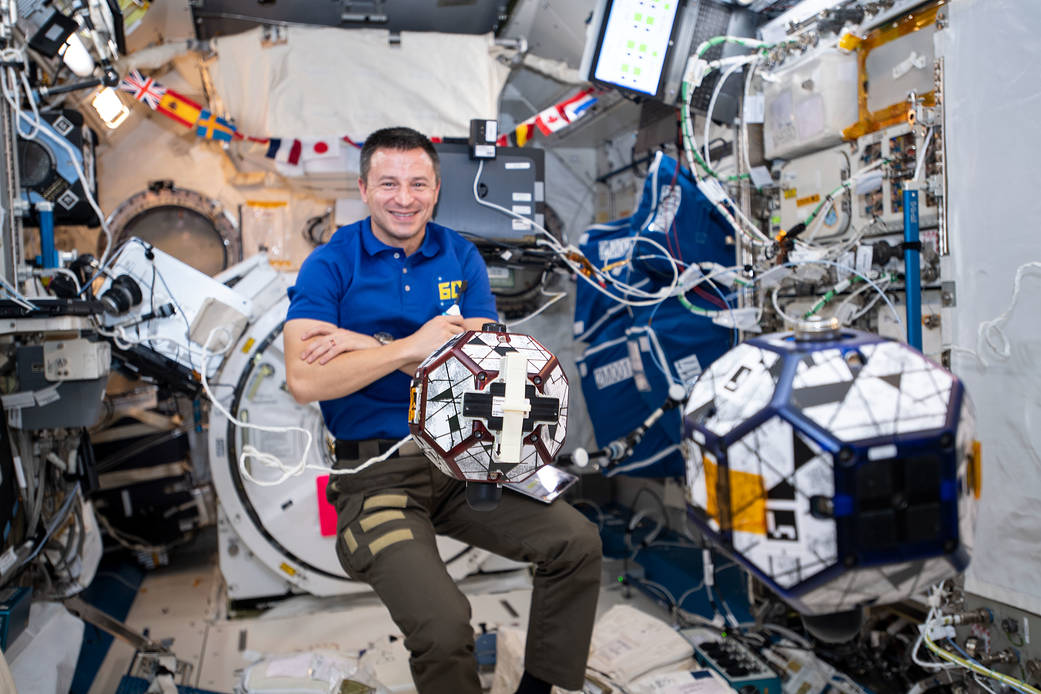
Expedition 60 Flight Engineer Andrew Morgan of NASA monitors a pair of free-floating satellites known as SPHERES.
NASA
The design of an earlier robot tested on the space station, Robonaut, resembled a human. It had a torso, arms with human-like hands, a head, and legs with end effectors that allowed it to move around inside the space station. While on the station, Robonaut flipped switches, removed dust covers, and cleaned handrails6.
The ISAAC investigation combined Robonaut and the Astrobees to demonstrate a technology to track the health of exploration vehicles, transfer and unpack cargo, and respond to issues such as leaks and fires. A second phase of testing aboard the station focuses on managing multiple robots as they transport cargo between an uncrewed space station and visiting cargo craft. In the third and final phase of testing, the team will create more difficult fault scenarios for the robots and develop robust techniques to respond to anomalies.
These and other robotics investigations contribute to the success of future missions, where robots could help crew members with a variety of tasks, freeing up their time and reducing the risks of working outside spacecraft and habitats. Robotic assistants have important applications in harsh and dangerous environments on Earth as well.
1 Bondi L, Chuang G, Ick C, Dave A, Shelton C, Coltin B, Smith T, Das S. Acoustic imaging aboard the International Space Station (ISS): Challenges and preliminary results. ICASSP 2022 – 2022 IEEE International Conference on Acoustics, Speech and Signal Processing, Singapore, Singapore. 2022 May; 5108-5112. (https://ieeexplore.ieee.org/document/9746256)
3 Chen TG, Cauligi A, Suresh SA, Pavone M, Cutkosky MR. Testing gecko-inspired adhesives with Astrobee aboard the International Space Station: Readying the technology for space. IEEE Robotics and Automation Magazine. 2022 May 27; 2-11 (https://ieeexplore.ieee.org/document/9783137)
4 Oestreich CE, Espinoza AT, Todd J, Albee KE, Linares R. On-orbit inspection of an unknown, tumbling target using NASA’s Astrobee robotic free-flyers. IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) Workshops, 2021, Virtual Event. 2021 June 19-25; 2039–2047 (https://www.nasa.gov/mission/station/research-explorer/investigation/?#id=8324)
5 Chamitoff GE, Saenz-Otero A, Katz JG, Ulrich S, Morrell BJ, Gibbens PW. Real-time maneuver optimization of space-based robots in a dynamic environment: Theory and on-orbit experiments. Acta Astronautica. 2018 January 1; 142170-183 (https://www.sciencedirect.com/science/article/pii/S0094576516300431?via%3Dihub)
6 Diftler MA, Ahlstrom TD, Ambrose RO, Radford NA, Joyce CA, De La Pena N, Parsons AH, Noblitt AL. Robonaut 2 – Initial Activities On-Board the ISS. 2012 IEEE Aerospace Conference, Big Sky, MT. 2012 pp.1-12. (https://ieeexplore.ieee.org/document/6187268)
NASA Completes Key Step in Aviation Safety Research
4 min read
NASA Completes Key Step in Aviation Safety Research
NASA’s transformational vision for the skies above our communities includes enabling safer and more efficient air travel. Part of this goal involves using advanced new technology to prevent safety risks long before they have a chance to arise.
MTSI / NASA
NASA’s aeronautical innovators have completed a significant step in their pursuit of safer, more efficient aviation technologies that spot hazards before they occur.
The project recently completed Technical Challenge 1 (TC-1), Terminal Area Risk Management, the first step towards achieving what is known as an In-Time Aviation Safety Management System. This new type of aviation safety technology can effectively address potential hazards expected with the rise in demand for the number and types of aircraft flying in the National Airspace System.
As aviation operations continue to grow in scale and diversity, and with new modes of flight expected to rise in the near future, keeping the skies safe becomes increasingly complex and drives the need to transform the way order is maintained above our communities.
“What we’ve accomplished with TC-1 is really just beginning to scratch the surface of what’s possible,” said Kyle Ellis, NASA’s project manager for System-Wide Safety. “Developing these systems enables a new economy for aviation uses that will benefit us all in the future.”
Planning Ahead
In a busy aviation environment, an In-Time Aviation Safety Management System can efficiently identify and predict safety issues a human would be hard tasked to keep up with.
In today’s airspace safety system, let’s say an air traffic manager is looking at their screen and guiding 10 airplanes towards their destinations. This person would use a combination of established safety rules and pattern recognition to make sure those aircraft remain a safe distance apart. If this person saw a hazard that posed a safety risk, they would work with the pilots aboard the aircraft and resolve the issue.
Now, let’s think about the airspace of tomorrow. Instead of 10 airplanes total, 10 air taxis, 10 ultra-efficient airliners, and 10 commercial supersonic jets might be sharing the same confined airspace. Preventing and addressing hazards would become a more complex issue nearly impossible for a person to identify in time to prevent an accident.
An In-Time Aviation Safety Management System is designed to identify these events much more rapidly than human operators, then quickly deliver actionable safety procedures to prevent the dangerous situation long before it develops.
Furthermore, preventing these situations from ever arising in the first place increases the efficiency of the airspace overall, since not as much time and effort would be spent by managers keeping things running smoothly.
Laying the Foundation
TC-1 contributed several important pieces of technology working towards the development of such a system. These contributions improve aviation safety not just for tomorrow – but also for today.
For example, part of the research included using new machine learning algorithms to analyze data gathered from major airlines, which use existing aviation safety management systems, to discover potential safety risks that had previously been undefined – overall making things safer.
Researchers also gathered information on exact ways human safety managers, pilots, air traffic controllers, and others interact with safety procedures. The team identified useful, efficient practices, as well as those that could potentially lead to safety risks. Their work contributes substantially to improving training and safety operations.
Additionally, researchers studied human performance and fatigue, partnering with pilots to study how various factors such as flight scheduling, certain short-haul routes, and even the COVID-19 pandemic affect operations.
Other results include prototype safety tools and surveys on human performance.
With this more comprehensive understanding of the safety landscape, NASA and its partners can more effectively continue ushering in new safety technologies.
“We focused on gathering data on current-day operations, but always have an eye for the near future,” said Nikunj Oza, subproject manager for TC-1. “We can use the lessons learned about current aviation safety to best inform new systems.”
NASA’s Lucy Spacecraft Discovers 2nd Asteroid During Dinkinesh Flyby
3 min read
NASA’s Lucy Spacecraft Discovers 2nd Asteroid During Dinkinesh Flyby
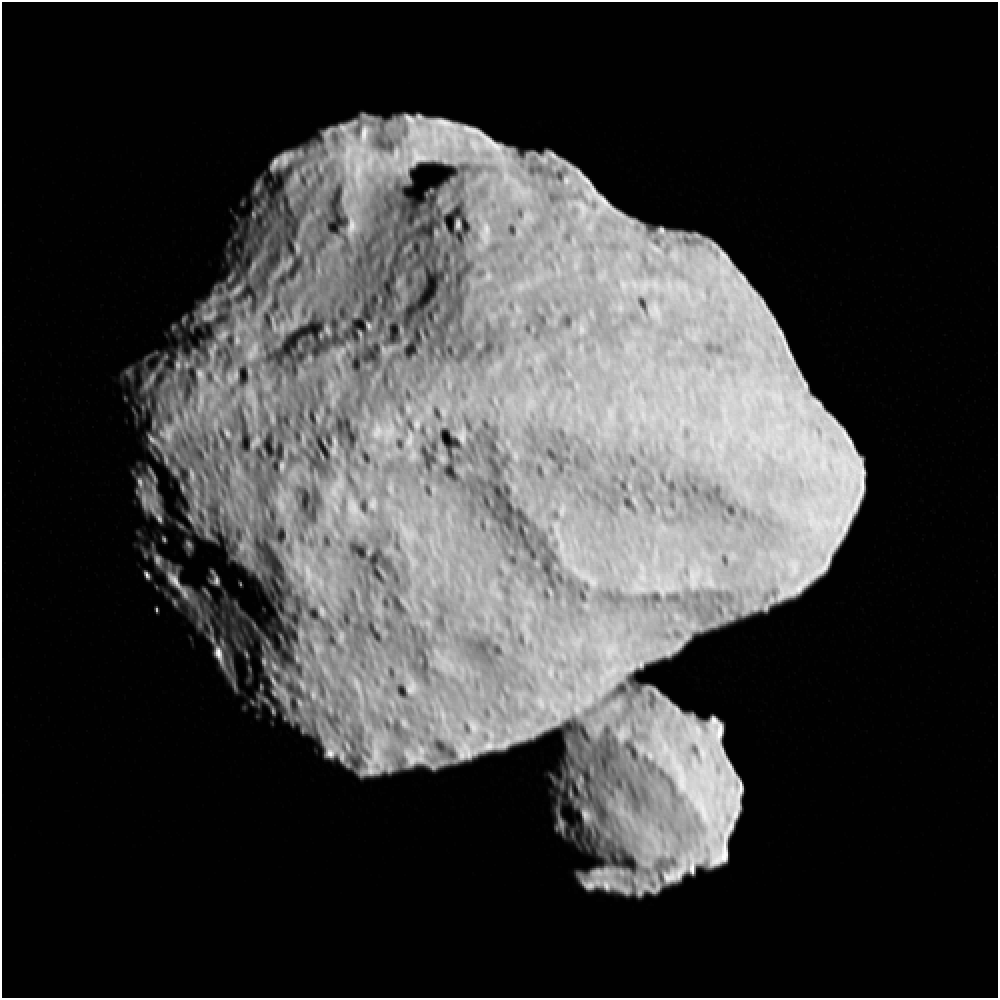
On Nov. 1, NASA’s Lucy spacecraft flew by not just its first asteroid, but its first two. The first images returned by Lucy reveal that the small main belt asteroid Dinkinesh is actually a binary pair.
This image shows the “moonrise” of the satellite as it emerges from behind asteroid Dinkinesh as seen by the Lucy Long-Range Reconnaissance Imager (L’LORRI), one of the most detailed images returned by NASA’s Lucy spacecraft during its flyby of the asteroid binary. This image was taken at 12:55 p.m. EDT (1655 UTC) Nov. 1, 2023, within a minute of closest approach, from a range of approximately 270 miles (430 km). From this perspective, the satellite is behind the primary asteroid. The image has been sharpened and processed to enhance contrast.
NASA/Goddard/SwRI/Johns Hopkins APL/NOAO
“Dinkinesh really did live up to its name; this is marvelous,” said Hal Levison, referring to the meaning of Dinkinesh in the Amharic language, “marvelous.” Levison is principal investigator for Lucy from the Boulder, Colorado, branch of the San-Antonio-based Southwest Research Institute. “When Lucy was originally selected for flight, we planned to fly by seven asteroids. With the addition of Dinkinesh, two Trojanmoons, and now this satellite, we’ve turned it up to 11.”
In the weeks prior to the spacecraft’s encounter with Dinkinesh, the Lucy team had wondered if Dinkinesh might be a binary system, given how Lucy’s instruments were seeing the asteroid’s brightness changing with time. The first images from the encounter removed all doubt. Dinkinesh is a close binary. From a preliminary analysis of the first available images, the team estimates that the larger body is approximately 0.5 miles (790 m) at its widest, while the smaller is about 0.15 miles (220 m) in size.
This encounter primarily served as an in-flight test of the spacecraft, specifically focusing on testing the system that allows Lucy to autonomously track an asteroid as it flies past at 10,000 mph, referred to as the terminal tracking system.
A series of images of the binary asteroid pair, Dinkinesh, as seen by the terminal tracking camera (T2CAM) on NASA’s Lucy spacecraft during its closest approach on Nov. 1, 2023. The images were taken 13 seconds apart. The apparent motion of the two asteroids is due to the motion of the spacecraft as it flew past at 10,000 mph (4.5 km/s). These images have been sharpened and processed to enhance contrast.
NASA/Goddard/SwRI/ASU
“This is an awesome series of images. They indicate that the terminal tracking system worked as intended, even when the universe presented us with a more difficult target than we expected,” said Tom Kennedy, guidance and navigation engineer at Lockheed Martin in Littleton, Colorado. “It’s one thing to simulate, test, and practice. It’s another thing entirely to see it actually happen.”
While this encounter was carried out as an engineering test, the team’s scientists are excitedly poring over the data to glean insights into the nature of small asteroids.
“We knew this was going to be the smallest main belt asteroid ever seen up close,” said Keith Noll, Lucy project scientist from NASA’s Goddard Space Flight Center in Greenbelt, Maryland. “The fact that it is two makes it even more exciting. In some ways these asteroids look similar to the near-Earth asteroid binary Didymos and Dimorphos that DART saw, but there are some really interesting differences that we will be investigating.”
It will take up to a week for the team to downlink the remainder of the encounter data from the spacecraft. The team will use this data to evaluate the spacecraft’s behavior during the encounter and to prepare for the next close-up look at an asteroid, the main belt asteroid Donaldjohanson, in 2025. Lucy will then be well-prepared to encounter the mission’s main targets, the Jupiter Trojan asteroids, starting in 2027.
By Katherine Kretke Southwest Research Institute, San Antonio
Media contact: Nancy N. Jones NASA’s Goddard Space Flight Center, Greenbelt, Md.